| Namespace | No namespace | |||||||||||||||||||||||||||
|
Annotations
|
|
|||||||||||||||||||||||||||
|
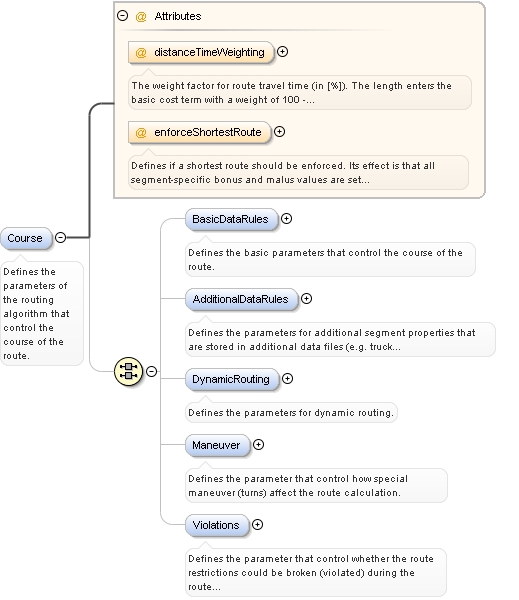
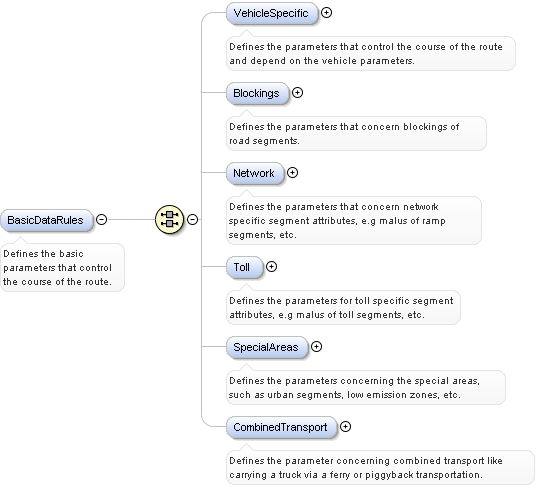
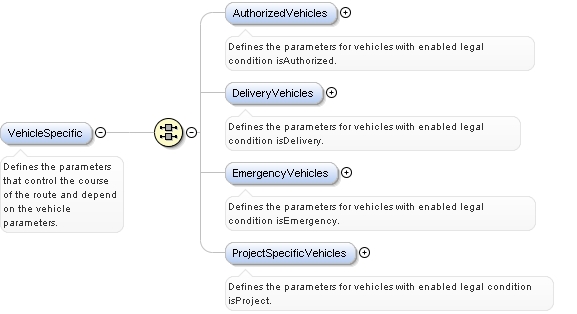
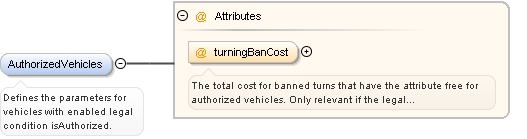
Diagram
|
 |
|||||||||||||||||||||||||||
|
Properties
|
|
|||||||||||||||||||||||||||
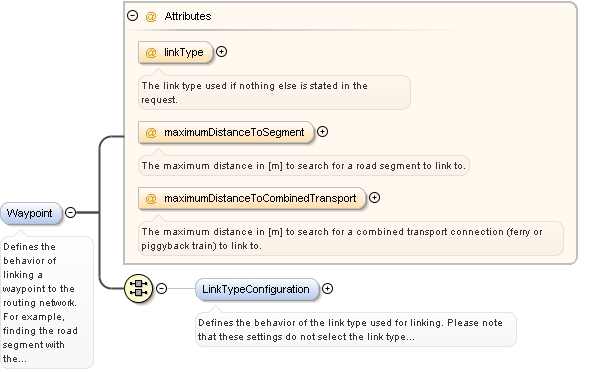
| Model | ALL(LinkTypeConfiguration{0,1}) | |||||||||||||||||||||||||||
| Children | LinkTypeConfiguration | |||||||||||||||||||||||||||
|
Instance
|
|
|||||||||||||||||||||||||||
|
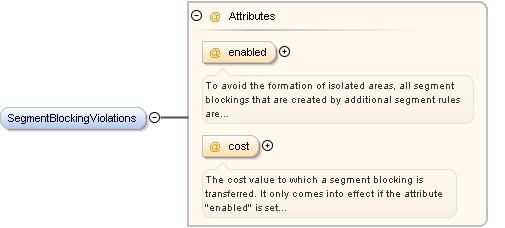
Attributes
|
|