This code sample illustrates how to configure dynamic heading weights using the Unified Profile Mechanism.
Dynamic heading difference weights allow you to configure the consideration of heading differences dependent on the current speed.
The heading difference between the current position on the matched track and the GPS signal is used to determine and rate possible turns. For slowly moving vehicles the heading of the GPS track may vary significantly from the actual driving direction. Therefore the heading difference should be weighted less for slow speeds to prevent unwanted turns. To achieve this the dynamic adjustment of heading difference weights can be configured in the XML profile element Weights in Mapmatching which is of type WeightsDynamicHeadingDifferenceRating.
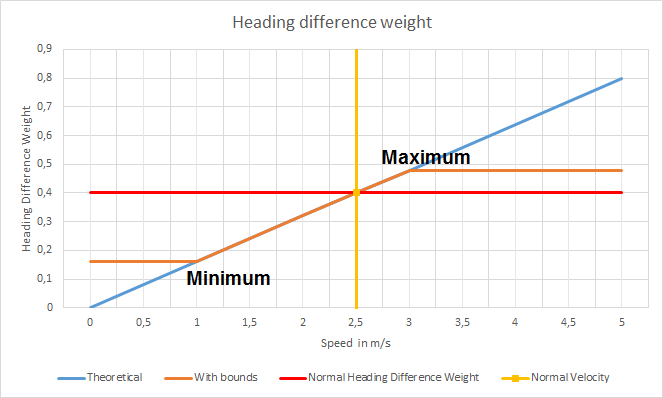
The (effective) heading difference weight can be calculated dynamically for each position with respect to its speed. If the input position provides a low speed, the influence of the heading difference in the final rating can be reduced. Therefore a normal velocity can be provided as a "reference" speed for which the effective weight is to equal the normal heading difference weight. If the speed decreases, the effective weight decreases as well, and if the speed increases, the effective weight increases, too. To avoid too extreme variations in the weight, the range is bounded by configurable minimum and maximum values:
Copyright © 2025 PTV Logistics GmbH All rights reserved. | Imprint