How to Reconstruct a Route From a GPS Track
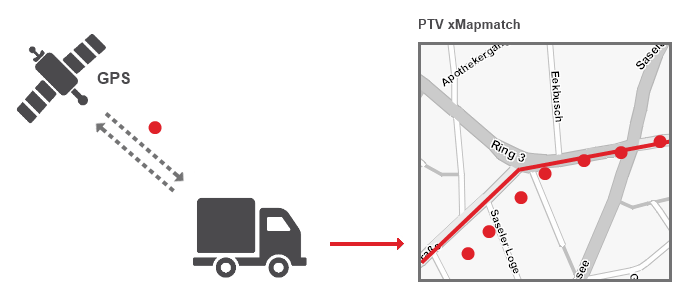
The PTV xMapmatch Server tries to detect the most probable driven route based on the tracked GPS positions. The server uses map matching:
- Map matching is a technique to reference a GPS position on a digital map.
- Map matching dose not find the best routing solution. It detects the possible driven route in dependency of the frequency of received GPS signals.
Using the PTV xMapmatch Server, it is possible to determine on which street a car currently is most probably located. The geographic locations, which are used as input of the PTV xMapmatch Server, usually are provided by a GPS receiver or a combination of sensors which allow the determination of an approximated position. The accuracy of the positions detected by a device varies depending on several conditions. For example environmental influences or the method of position detection by the device itself. A GPS position for civil usage for example only allows an accuracy of 15 meter. Under sub-optimal conditions the detected position may differ from the actual position by 100 meter or more. Due to this reason PTV xMapmatch tries to find the possible driven route. It is not guaranteed that he find the exact route.
You can choose between two calculation modes:
- Global matching: Tries to reconstruct the possible driven route by using the already recorded GPS positions.
GPS positions may not be accurate and in particular, the reference to the corresponding street segment is not known on the existing digital map. The PTV xMapmatch Server is building a history of previously determined positions on the street segments and is trying to predict the next street segment where a newly detected position might be occur in consideration of the previous detected locations. Doing this, inaccuracies of the incoming locations are relieved and more precise positions are identified to reference the actually used road segment.
- Local matching: Try to match one single GPS position on the digital map without considering the previous detected positions.
During the matching, driving restrictions are also included such as tunnels, one-way streets, pedestrian areas etc. Plausibility checks for the reconstruction of routes and the analysis of junction and turn-off situations ensure reliable results.
The PTV xMapmatch Server contains a standstill recognition and processes dense (second interval) and sparse signals (minute interval). It provides a road category (network class) for every matched segment and the permitted speed limit wherever available. In addition, the PTV xMapmatch Server provides a summary of the route. This contains the total distance and duration as well as a corresponding segment list and a polyline of the matched route.
Benefits
- Basic tracking and map matching
- GPS inaccuracy correction and automatic route matching validation, recognising driving directions and further rules.
- Match GPS tracks to the street segments of a PTV map and get reliable results.
- Get a list of matched locations respectively segments, overall time and length of the routes.
- Do more exact analysis of distances actually covered (e.g. variance analysis) concerning distance-related parameters.
- Dissect driving behaviour like mileage, breaks and speeding.
- Track the vehicles by location and/or paint the route geometry using PTV xMap Server.
- Get information about the street network classes and speed limits.
- Watch one or many vehicles simultaneously.
- Do more exact analysis of distances actually covered (e.g. variance analysis) concerning distance-related parameters.
- Pay as you drive
- Get the overall time and length of the vehicle routes
- Create driving reports and compare real driven speed with speed limits
- Sectors: Motor vehicle civil liability insurance, insurance premiums
- Fleet Management
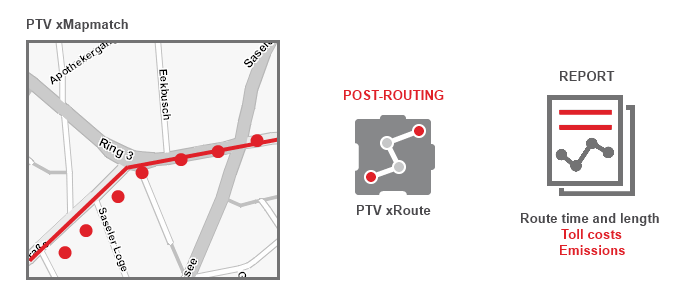
- Detailed cost analysis in combination with PTV xRoute Server. For target/actual comparison considering distance and speed limits
- Detailed controls of toll calculations or the calculation of emissions, in combination with PTV xRoute Server
- In combination with PTV xRoute Server, performance and compliance measurements can be executed. In particular, target-performance comparisons with toll cost or emission calculation increases the business value for haulers. Furthermore, the output of PTV xMapmatch Server provides useful information about speed limits and network classes which are mandatory to detect violations of speed limits.
- Sectors: Transport companies
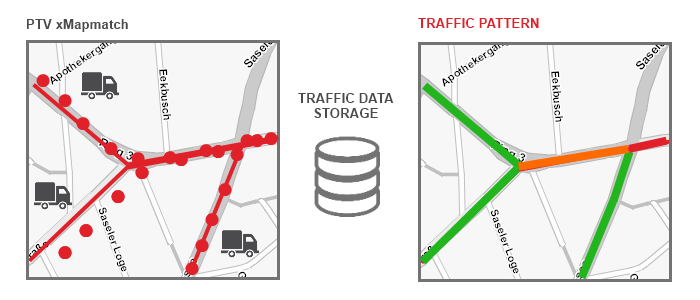
- Floating Car Data (FCD)
- Assumed adequate input data, PTV xMapmatch could be the base for generation of historical traffic information (traffic pattern)
- Calculation respectively analysis might be also used for profile training
- Sectors: Transport companies, research institutes
- Geofencing
- Define a preferred route which shall not be left. Example: Monitoring of money transporters for safety reasons.
- Validate if a vehicle exits a defined area. Example: Leasing of machinery for road constructions.
- Sectors: Transport companies
- Generation of Heatmaps
- Cellphone provider achieves information (age,...) about the mobile owner and his current position. The company can trigger advertising for this group of people considering the current location.
- Sectors: Advertising companies
What does the PTV xMapmatch Server not provide
- A route calculation on the given network. Use instead the PTV xRoute Server.
- Visualisation on a map. Use instead the PTV xMap Server.
- Reverse geocoding of a given location. Use instead the PTV xLocate Server.
- There isn't a hundred per cent guarantee that all matched segments correspond to the actual driven route. This depends primarily on the density of the GPS signals.
Configuration
There are some profiles for the special use cases of the PTV xMapmatch Server.
- default - The default profile uses historical information. This should be used to trace back a possible driven route based on the detected GPS positions. The consecutive candidates are stored from a list of likely used paths for historical recordings. The ongoing process enables to detect new proper candidates taking all information into account. This is the so-called global matching.
This profile can be used for 1 minute intervals.
- local-matching - The historical contemplation is hereby turned off. All tracked positions are only matched local. That means the PTV xMapmatch Server is not going to reconstruct the driven route but automatically matches each position to the map by itself.
- dense-signal - Profile for dense GPS signals like 1 second per interval. For example for routes in town. The historical contemplation is turned on. The server starts to reconstruct the driven route.
- sparse-signal - Profile for sparse GPS signals which defines an interval from 1 until 5 minutes. The historical contemplation is turned on. The server also starts to reconstruct the driven route. The crawling algorithm has to look for more possible ways at junctions which can be driven if there are less GPS signals. This calculation needs more memory.
The lower the selected frequency of the incoming GPS signals the lower the accuracy of matching the de facto driven road.
A recommended profile does not exist for all feasible usage types. If a vehicle is exemplarily on a highway, the GPS signal could be rare because there are only several junctions which have to be considered for matching. In this case we recommend selecting the default profile.
If the vehicle is in a city the income of the signal has to be frequently because there are many junctions and with them a lot of opportunities which way the vehicle has effectively used. In this case choose the dense-signal profile.
Caution: Some GPS devices record the signals more frequently in the city and less on a highway. For this specific case we don't provide an appropriate profile.
Programming Guide
Map matching is the process of overlaying a potential route based on GPS tracks on a given map. Therefore, the street segments have to be detected according to the provided GPS positions. Due to the inaccuracy of the GPS signals and the different tracking periods, the precise referencing of the actually used street segments is challenging. This is the main purpose of the PTV xMapmatch Server. The following code samples might give an impression of the possible applications divided in basic and advanced levels.
| matchTrack() |
How to match GPS tracks in principle? |
basic |
Method is deprecated. Please use matchPositions() with the same result. |
| matchTrackExtended() |
How to illustrate the matched GPS tracks? Return polylines and speed classes. |
advanced |
Method is deprecated. Please use matchPositions() with the same result. |
| matchPositions() |
How to match GPS tracks selecting additional parameters such as polyline, speed class or vendor id? |
basic |
Method is recommended for enhancements. |
| matchPositions() |
How to match GPS tracks using the Unified Profile Mechanism? |
advanced |
Method is recommended for enhancements. |
The entire code samples are also available as stand-alone java or C# programs.
Copyright © 2025 PTV Logistics GmbH All rights reserved. | Imprint